
人機協作利器!電動夾爪搭配協作機器人使用指南,精準又安全
協作機器人搭配電動夾爪,堪稱車間人機協同作業的“黃金組合”。協作機器人靈活安全,能和工人近距離配合;電動夾爪精準可控,能穩穩拿捏各類工件,二者結合既能解放人工干重復活,又能保證作業精度,適配多品種、小批量的生產需求。但不少人搭配時總踩坑,要么夾爪和機器人不兼容,要么調試不到位導致安全隱患,反而影響效率。今天就嘮嘮電動夾爪怎么給協作機器人用,從選型適配到調試實操,再到場景技巧,全給你講透,新手也能快速上手。

第一步先搞定選型適配,這是基礎中的基礎,選不對后續全白搭。核心看三點:負載、尺寸和通訊。協作機器人負載普遍不大,大多3-10kg,所以電動夾爪自身重量得控制好,最好不超過機器人負載的10%,不然機器人帶不動,還會影響運動精度。比如負載5kg的機器人,選夾爪就別超500g。尺寸方面,協作機器人末端法蘭多是50mm×50mm或65mm×65mm,夾爪安裝尺寸得對應,本體還要緊湊,不然狹小工位里容易碰設備、碰工人。通訊兼容性也關鍵,盡量選和機器人同品牌或支持EtherCAT、Modbus協議的夾爪,不然還要額外加轉接器,調試起來特別麻煩。
選型到位后就是安裝調試,這步要兼顧精度和安全。安裝和普通夾爪一樣,法蘭盤對準機器人末端,用配套螺栓擰緊,重點是中心對齊,歪一點就會導致抓取偏移,精度直接拉胯。接線比單獨用夾爪簡單,大多是供電線加通訊線,對照機器人和夾爪說明書接好,確認正負極和接口沒錯再通電。通電后先做空載測試,手動模式下讓機器人帶動夾爪小幅移動,再控制夾爪開合幾次,看看運動是否順暢,有沒有異響。協作機器人自帶碰撞檢測,調試時可以調低靈敏度閾值,避免輕微觸碰就停機,影響作業節奏。
參數設置要兼顧抓取效果和人機安全,這是協作場景的關鍵。電動夾爪的夾持力、開合速度得按工件來定,寧小勿大。比如抓0.3kg的手機中框,夾持力設1-2N就夠,速度開50mm/s以內,既抓得穩又不會夾壞工件,就算不小心碰到工人也不會造成傷害。還要給夾爪設置限位保護,開合行程別超出工件尺寸,避免夾爪空行程碰撞。另外,在機器人系統里要聯動夾爪信號,讓機器人能識別夾爪是否抓牢工件,抓不穩就不啟動后續動作,防止工件掉落砸傷或影響生產。
參數調好就進入試作業環節,反復微調直到達標。先在手動模式下示教,拖動機器人帶動夾爪走一遍流程:移動到工件上方→夾爪閉合抓取→移動到目標位置→夾爪松開。示教時重點校準抓取和放置的位置,觀察夾爪抓取是否穩定,工件有沒有打滑、變形。比如在電子廠組裝零件,需要夾爪抓取零件后配合機器人旋轉裝配,就得反復微調夾爪力度和機器人運動軌跡,確保對接精準。試作業3-5次都穩定后,保存程序切換到自動模式,讓機器人和夾爪協同作業,同時安排工人在旁觀察,有問題及時停機調整。
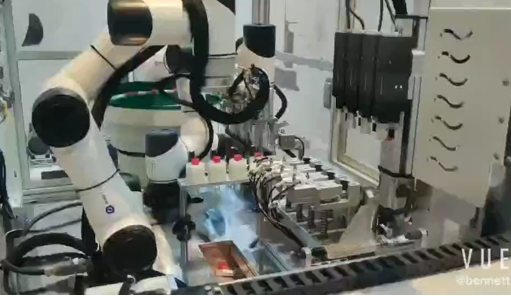
不同協作場景,用法也得靈活調整。3C電子行業的精密裝配,選微型電動夾爪搭配視覺系統,讓夾爪實時反饋抓取狀態,機器人根據反饋微調位置,保證毫米級裝配精度。汽車零部件車間,用重載電動夾爪抓取5kg以上的零件,開啟夾爪機械自鎖功能,旋轉或移動時防止工件掉落,同時機器人要設置安全區域,避免和工人作業范圍沖突。食品包裝場景,換柔性電動夾爪抓糕點、水果,調低夾持力和運動速度,既不損傷工件,又能和工人配合完成包裝流程。
再分享幾個實用技巧和避坑要點。技巧上,不同工件保存對應的參數組,切換訂單時直接調用,不用重新調試;給夾爪加裝防滑膠套,提升抓取穩定性,尤其適合光滑工件。避坑方面,定期檢查夾爪磨損和接線松動情況,協作場景里一點小故障都可能引發安全問題;不要隨意關閉機器人的碰撞檢測功能,就算追求效率,也要保留基礎安全防護;在粉塵、潮濕環境作業,給夾爪裝防護罩,避免內部電機損壞,影響協同穩定性。
舉個真實案例,某電子廠用協作機器人搭配電動夾爪做手機攝像頭組裝,之前人工組裝良率92%,效率還低。搭配后選了適配的微型電動夾爪,參數設為夾持力0.8N、速度40mm/s,通過示教編程讓機器人和夾爪協同作業,工人只負責上料和質檢。不僅良率沖到99.7%,效率提升60%,還避免了人工長期重復作業導致的失誤,車間布局也更緊湊,不用給機器人設置單獨隔離欄。
總的來說,電動夾爪給協作機器人用,核心就是“選對適配型號、調好安全參數、做好協同調試”。二者搭配的關鍵是平衡精度、效率和安全,不用追求高端配置,貼合自身工況就好。新手不用怕復雜,多試幾次示教和參數微調,就能熟練掌握。這套組合能輕松應對柔性生產需求,不管是精密裝配還是人機協同搬運,都能成為車間提效的好幫手。

;){kind=link}